Abstract
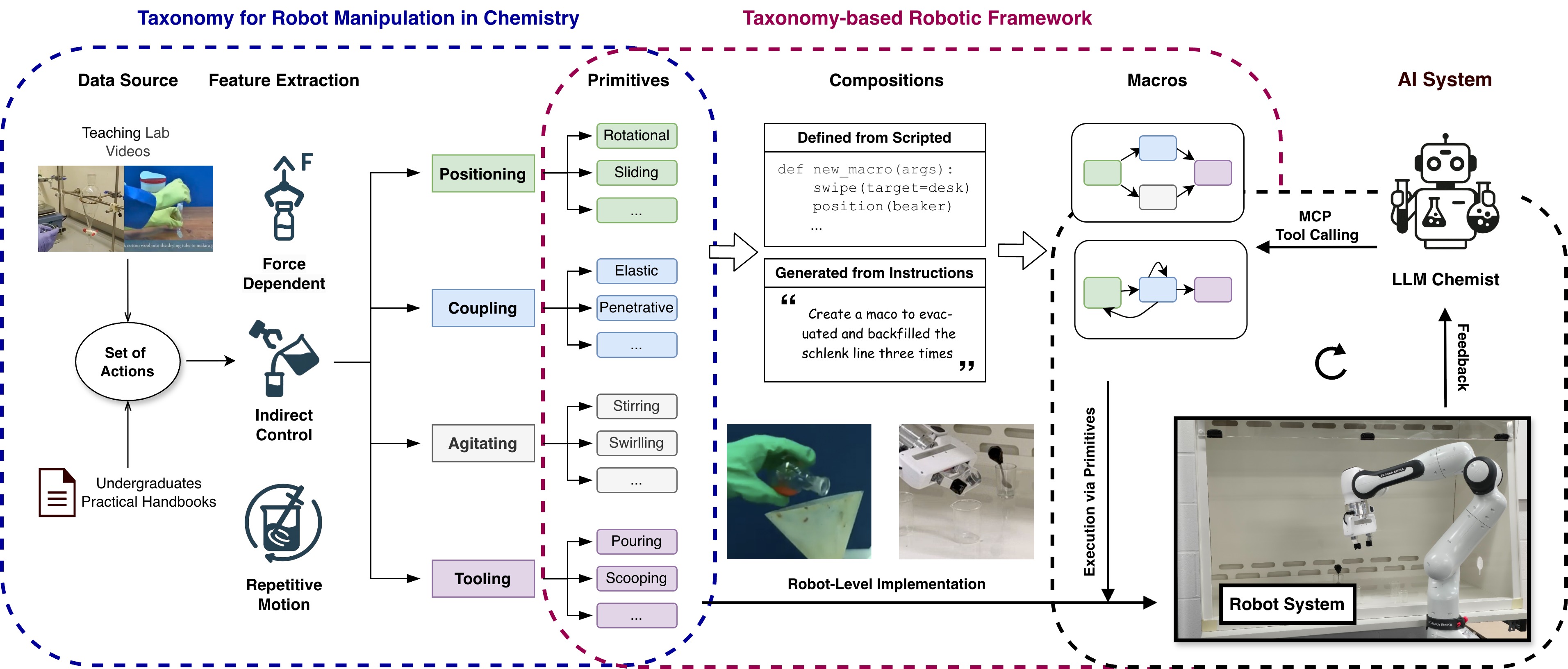
Chemistry laboratory automation seeks to increase throughput, reproducibility, and safety, yet many existing systems still rely on frequent human intervention. Recent advances in robotics have reduced such dependency, but without a structured representation of the required skills, their autonomy remains constrained to bespoke, task-specific solutions with limited capacity to transfer beyond their initial design. Existing experiment abstractions primarily encode protocol-level steps, without specifying the robotic actions needed to carry them out. This gap reflects the absence of a systematic account of the manipulation skills required for robots in chemistry laboratories. To fill the critical gap, this work introduces TARMAC – a TAxonomy for Robot MAnipulation in Chemistry – a domain-specific taxonomy that defines and organizes the core manipulations required in chemistry laboratories. Using annotated teaching-lab demonstration and supported by experimental validation, TARMAC categorizes actions according to their functional role and physical execution requirements. In addition to serving as a descriptive vocabulary, TARMAC can be instantiated as a robot-executable primitives and composed into higher-level macros, enabling the reuse of skills and supporting scalable integration into long-horizon workflows. These contributions establish a structured foundation for more flexible and autonomous laboratory automation.
Overview of TARMAC